
NRI: FND: LIGHT-POWERED MICROROBOTS FOR FUTURE MICROFACTORIES
Introduction
In this project, we study microrobots powered by light in two schemes: Type R (or remotely powered by a laser beam) and Type E (or by light energy scavenging and storage). Some of the key research challenges are: 1) Optimizing microrobot designs to efficiently transform incident optical energy into useful motion commands to achieve controlled locomotion by differential resonance and differential thermal expansion of actuators 2) Investigate the optimal roughness of the dry surface 3) Adaptive controller development with real-time location tracking, laser parameter synchronization with the movement of multi-dimensional stages in order to guide a microrobot from one point to another 4) Cooperatively manipulate objects with multiple microrobots.
With these two demonstrators, there are two research aims being pursued:
- Aim 1: Model the response of actuators with respect to the temporal variables of an incident light beam on different materials and ambient environments. Select light variables, such as wavelength, pulse width, and frequency to obtain the best differentiation between motion responses. Determine optimal geometries and placement of actuators for efficient power utilization, maneuverability and precision.
- Aim 2: Formulate motion-predictive control and adaptive impedance control algorithms based on selective actuator responses and use them to send wireless maneuver and haptic commands to microrobots. Formulate robust path planning algorithms for microrobots through learning. Formulate new haptic teleoperation algorithms for operator immersion and cooperative pushing in the environment.
Activities
- Design, FEA simulation, & actuator response analysis of two types of remote-powered, MEMS based microrobots.
- Cleanroom fabrication, and micro-assembly.
- Parametric investigation of laser parameters i.e. power, spot size, pulse width & frequency on the locomotion of the microrobots.
- Study the effect of surface roughness of media on locomotion of the microrobots
- Developing opto-thermo-mechanical models of microrobots.
- Formulate motion-predictive control and adaptive impedance control algorithm based on selective actuator responses.
- Developing laser scanner-based instrument to actuate multiple robots simultaneously.
- Synchronized control and learning of multiple robots on dry surface.
- Designing portable microrobot demonstrator.
Micro-Robotics team
- Moath Hasan Atallah Alqatamin (Postdoctoral associate): Controller design and implementation
- Andriy Sherehiy (Postdoctoral associate): Experimentation and optical set-up
- Ruoshi Zhang (Postdoctoral associate): SolerPede design and experiments
- Zhong Yang (PhD student): FEA simulation, controller design, microfabrication
- Danming Wei (PhD student): microassembly and assembly station design, assist in LabVIEW programming
- Patrick Clapacs (undergrad student): simulation & microassembly
- Mariah B Hall (undergrad student, past contributor): Microassembly
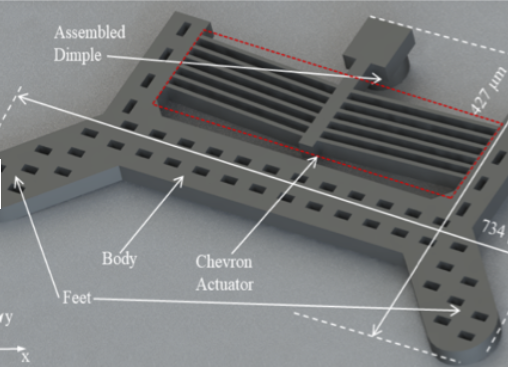
Chevbot
SolarPede
sAFAM
(nri) Project Team